Abstract
André-Guy Martin1, Genevieve Miron2, Catherine Veronneau2, Francis Therien2, David Bouchard3, Jean-Sebastien Plante3
1Centre Hospitalier Universitaire de Québec - L'Hôtel-Dieu de Québec, Québec, QC
2 Université de Sherbrooke, Sherbrooke, QC
3Polymer Robotics Inc., Sherbrooke, QC
Purpose: Demonstrate the feasibility of fiducial marker insertion in a prostate phantom, using a robotic manipulator for needle guidance under MRI with real time guidance.
Materials and Methods: An anatomical prostate phantom gel reproduction was made out of a volunteer MRI image sets using a 3D printing technology. Target bubles (5mm in diameter) were incorporated in the prostate mold. The phantom was place on the MR couch just above the robotic needle guide, as we would place a subject for prostate brachytherapy. The robotic manipulator using soft pneumatic air-muscles actuators served for needle guidance. Using a Siemens Magnetom Trio syngo MR B17 closed bore 3-tesla MR scanner, imaging of the phantom was done (T1 and T2 weighted image sequences). Coordinates were entered in the computer driven robotic needle guide aiming to the prostate target (figure 1a, apex of the right lobe). The needle was robotically guided with correct orientation and was manually inserted to the targeted depth in the phantom, calculated from the MR images. A real-time image guided insertion (image refreshed rate of 1 second) was performed with the T1 weighted imaging, projected on a screen positioned at the cephalad end of the MR couch. There, using visual MR images reference, the marker was then dropped.
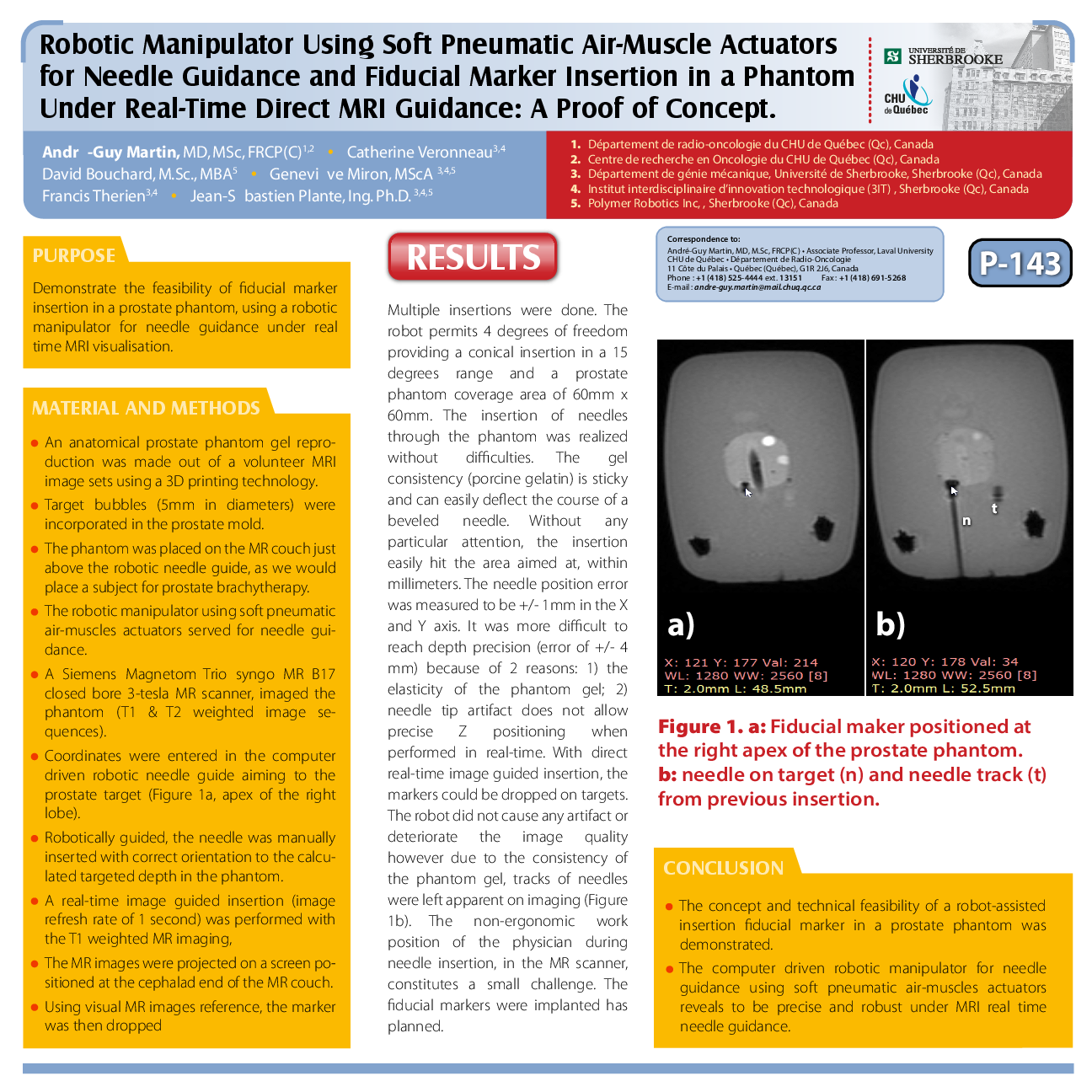
Results: Multiple insertions were done. The robot permits 4 degrees of freedom providing a conical insertion in a 15 degrees range and a prostate phantom coverage area of 60mm x 60mm. The insertion of needles through the phantom was realized without difficulties. The gel consistency (porcine gelatin) is sticky and can easily deflect the course of a beveled needle. Without any particular attention, the insertion easily hit the area aimed at within millimeters. The needle position error was measured to be +/- 1mm in the X and Y axis. It was more difficult to reach depth precision (error of +/- 4mm) because of two reasons: 1) the elasticity of the phantom gel; and 2) needle tip artifact does not allow precise Z positioning when performed in real-time. With direct real-time image guided insertion, the markers could be dropped on targets. The robot did not cause any artifact or deteriorate the image quality however due to the consistency of the phantom gel, tracks of needles were left apparent on imaging (Figure 1b). The non-ergonomic work position of the physician during needle insertion, in the MR scanner, constitutes a small challenge. The fiducial markers were implanted has planned.
Conclusions: The concept and technical feasibility of a robot-assisted insertion fiducial marker in a prostate phantom was demonstrated. The computer driven robotic manipulator for needle guidance using soft pneumatic air-muscles actuators reveals to be precise and robust under MRI real time needle guidance.