VerroTouch: Detection of Instrument Vibrations for Haptic Feedback and Skill Assessment in Robotic Surgery
Abstract
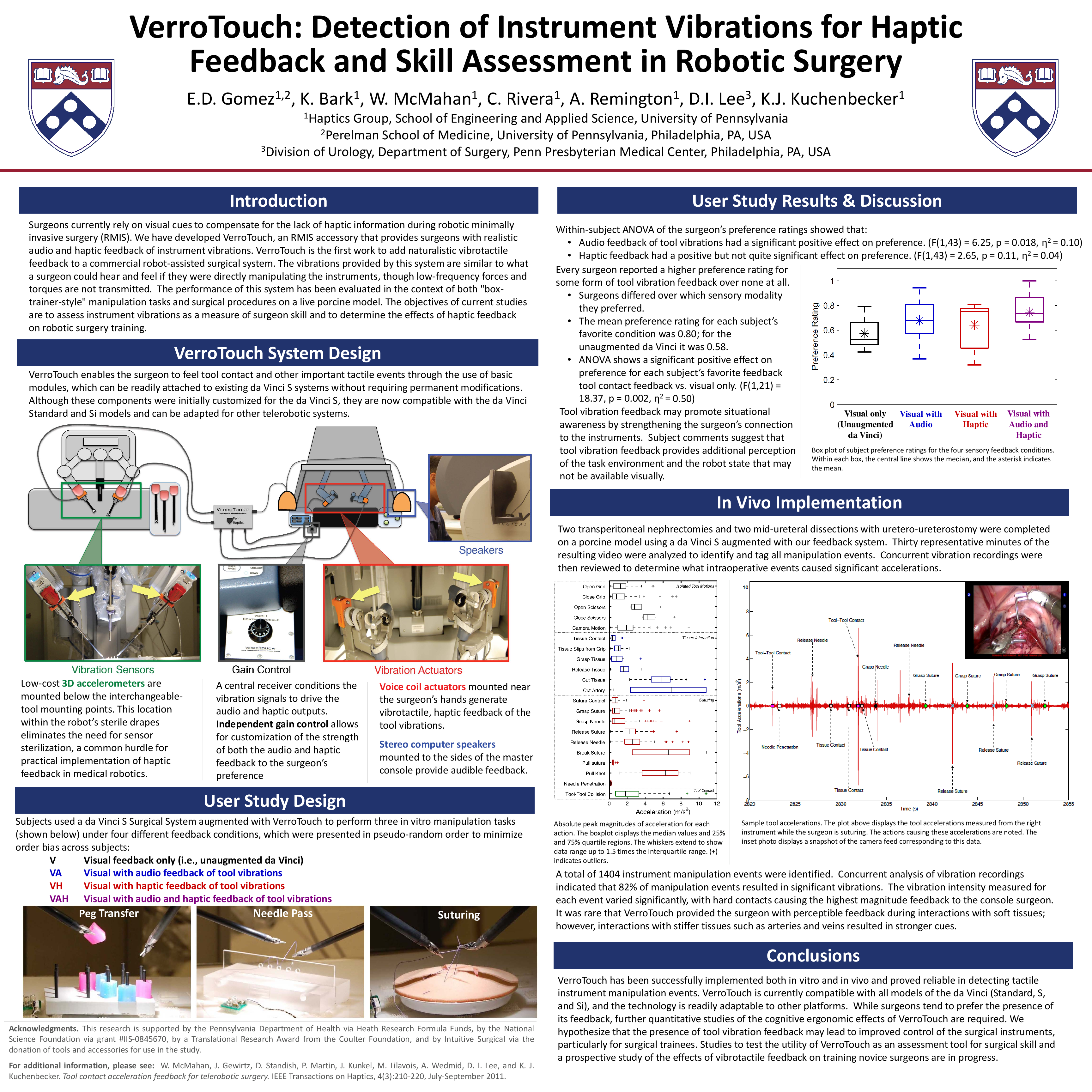
Surgeons currently rely on visual cues to compensate for the lack of haptic information during robotic minimally invasive surgery (RMIS). We have developed VerroTouch, an RMIS accessory that provides surgeons with realistic audio and haptic feedback of instrument vibrations. VerroTouch is the first work to add naturalistic vibrotactile feedback to a commercial robot-assisted surgical system. The vibrations provided by this system are similar to what a surgeon could hear and feel if they were directly manipulating the instruments, though low-frequency forces and torques are not transmitted. The performance of this system has been evaluated in the context of both "box-trainer-style" manipulation tasks and surgical procedures on a live porcine model. The objectives of current studies are to assess instrument vibrations as a measure of surgeon skill and to determine the effects of haptic feedback on robotic surgery training.
Related articles